Posts Tagged ‘force’
Saturday, July 29th, 2017
|
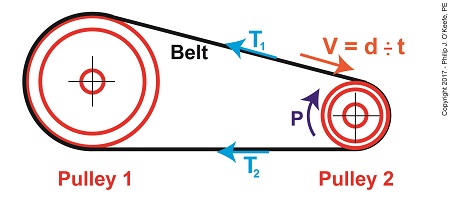
Last time we determined the value for one of the key variables in the Euler-Eytelwein Formula known as the angle of wrap. To do so we worked with the relationship between the two tensions present in our example pulley-belt assembly, T1 and T2. Today we’ll use physics to solve for T2 and arrive at the Mechanical Power Formula, which enables us to compute the amount of power present in our pulley and belt assembly, a common engineering task.
To start things off let’s reintroduce the equation which defines the relationship between our two tensions, the Euler-Eytelwein Formula, with the value for e, Euler’s Number, and its accompanying coefficients, as determined from our last blog,
T1 = 2.38T2 (1)
Before we can calculate T1 we must calculate T2. But before we can do that we need to discuss the concept of power.
The Mechanical Power Formula in Pulley and Belt Assemblies
Generally speaking, power, P, is equal to work, W, performed per unit of time, t, and can be defined mathematically as,
P = W ÷ t (2)
Now let’s make equation (2) specific to our situation by converting terms into those which apply to a pulley and belt assembly. As we discussed in a past blog, work is equal to force, F, applied over a distance, d. Looking at things that way equation (2) becomes,
P = F × d ÷ t (3)
In equation (3) distance divided by time, or “d ÷ t,” equals velocity, V. Velocity is the distance traveled in a given time period, and this fact is directly applicable to our example, which happens to be measured in units of feet per second. Using these facts equation (3) becomes,
P = F × V (4)
Equation (4) contains variables that will enable us to determine the amount of mechanical power, P, being transmitted in our pulley and belt assembly.
The force, F, is what does the work of transmitting mechanical power from the driving pulley, pulley 2, to the passive driven pulley, pulley1. The belt portion passing through pulley 1 is loose but then tightens as it moves through pulley 2. The force, F, is the difference between the belt’s tight side tension, T1, and loose side tension, T2. Which brings us to our next equation, put in terms of these two tensions,
P = (T1 – T2) × V (5)
Equation (5) is known as the Mechanical Power Formula in pulley and belt assemblies.
The variable V, is the velocity of the belt as it moves across the face of pulley 2, and it’s computed by yet another formula. We’ll pick up with that issue next time.
Copyright 2017 – Philip J. O’Keefe, PE
Engineering Expert Witness Blog
____________________________________ |
Tags: belt, distance divided by time, engineering, Euler-Eytelwein Formula, Euler's Number, force, loose side tension, mechanical power, mechanical power formula, power, power transmitted, pulley, tight side tension, velocity, work
Posted in Engineering and Science, Expert Witness, Forensic Engineering, Innovation and Intellectual Property, Personal Injury, Product Liability | Comments Off on The Mechanical Power Formula in Pulley and Belt Assemblies
Friday, November 18th, 2016
|
We’re all familiar with the phrase, “too much of a good thing.” As a professional engineer, I’ve often found this to be true. No matter the subject involved, there inevitably comes a point when undesirable tradeoffs occur. We’ll begin our look at this phenomenon in relation to compound pulleys today, and we’ll see how the pulley arrangement we’ve been working with encounters a rope length tradeoff. Today’s arrangement has a lot of pulleys lifting an urn a short distance.
We’ll be working with two distance/length factors and observe what happens when the number of pulleys is increased. Last time we saw how the compound pulley is essentially a work input-output device, which makes use of distance factors. In our example below, the first distance/length factor, d1, pertains to the distance the urn is lifted above the ground. The second factor, d2, pertains to the length of rope Mr. Toga extracts from the pulley while actively lifting. It’s obvious that some tradeoff has occurred just by looking at the two lengths of rope in the image below as compared to last week. What we’ll see down the road is that this also affects mechanical advantage.
The compound pulley here consists of 16 pulleys, therefore it provides a mechanical advantage, MA, of 16. For a refresher on how MA is determined, see our preceding blog.
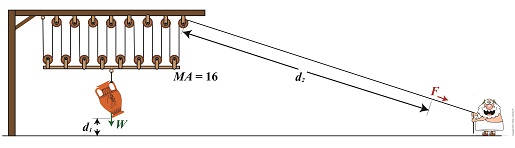
Rope Length Tradeoff in a Compound Pulley
With an MA of 16 and the urn’s weight, W, at 40 pounds, we compute the force, F, Mr. Toga must exert to actively lift the urn higher must be greater than,
F > W ÷ MA
F > 40 Lbs. ÷ 16
F > 2.5 Lbs.
Although the force required to lift the urn is a small fraction of the urn’s weight, Mr. Toga must work with a long and unwieldy length of rope. How long? We’ll find out next time when we’ll take a closer look at the relationship between d1 and d2.
Copyright 2016 – Philip J. O’Keefe, PE
Engineering Expert Witness Blog
____________________________________ |
Tags: compound pulley, effor, force, mechanical advantage, professional engineer, pulley, rope length, weight force, work
Posted in Courtroom Visual Aids, Engineering and Science, Forensic Engineering, Innovation and Intellectual Property, Personal Injury, Product Liability, Professional Malpractice | Comments Off on Rope Length Tradeoff in a Compound Pulley
Sunday, November 6th, 2016
|
In our last blog we saw how adding extra pulleys resulted in mechanical advantage being doubled, which translates to a 50% decreased lifting effort over a previous scenario. Pulleys are engineering marvels that make our lives easier. Theoretically, the more pulleys you add to a compound pulley arrangement, the greater the mechanical advantage — up to a point. Eventually you’d encounter undesirable tradeoffs. We’ll examine those tradeoffs, but before we do we’ll need to revisit the engineering principle of work and see how it applies to compound pulleys as a work input-output device.
Pulleys as a Work Input-Outut Device
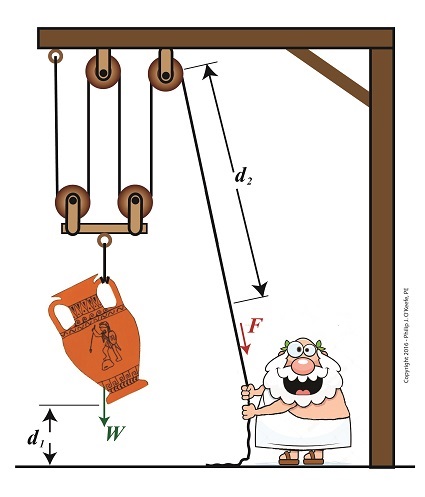
The compound pulley arrangement shown includes distance notations, d1 and d2. Their inclusion allows us to see it as a work input-output device. Work is input by Mr. Toga, we’ll call that WI, when he pulls his end of the rope using his bicep force, F. In response to his efforts, work is output by the compound pulley when the urn’s weight, W, is lifted off the ground against the pull of gravity. We’ll call that work output WO.
In a previous blog we defined work as a factor of force multiplied by distance. Using that notation, when Mr. Toga exerts a force F to pull the rope a distance d2 , his work input is expressed as,
WI = F × d2
When the compound pulley lifts the urn a distance d1 above the ground against gravity, its work output is expressed as,
WO = W × d1
Next time we’ll compare our pulley’s work input to output to develop a relationship between d1 and d2. This relationship will illustrate the first undesirable tradeoff of adding too many pulleys.
Copyright 2016 – Philip J. O’Keefe, PE
Engineering Expert Witness Blog
____________________________________ |
Tags: compound pulley, distance, engineering, engineering principle, force, mechanical advantage, pulley, weight, work, work input-output device, work of lifting
Posted in Engineering and Science, Expert Witness, Forensic Engineering, Innovation and Intellectual Property, Personal Injury, Product Liability | Comments Off on Pulleys as a Work Input-Outut Device
Friday, October 14th, 2016
|
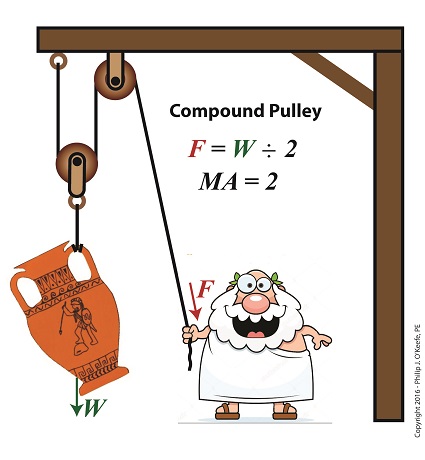
Last time we introduced the engineering concept of mechanical advantage, MA. Thanks to its presence in our compound pulley arrangement, it made a Grecian man’s job of holding an urn suspended in space twice as easy as compared to when he used a mere simple pulley. Today we’ll see what happens when our static scenario becomes active through dynamic lifting and how it affects his efforts.
Dynamic Lifting is Easier With a Compound Pulley
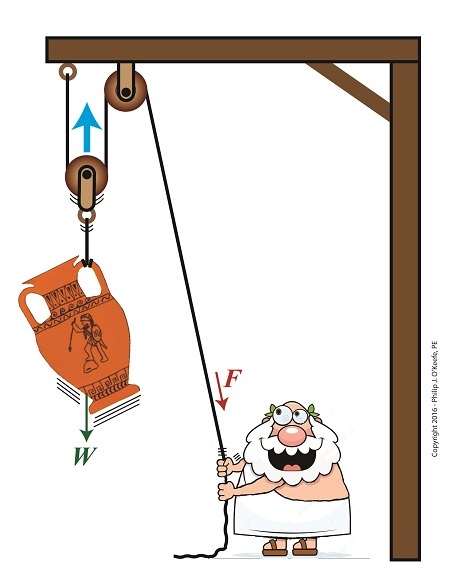
If you’ll recall from our last blog, Mr. Toga used a compound pulley to assist him in holding an urn stationary in space. To do so, he only needed to exert personal bicep force, F, equivalent to half the urn’s weight force, W, which meant he enjoyed a mechanical advantage of 2. Mathematically that is represented by,
F = W ÷ 2
If the urn weighs 40 pounds, then he only needs to exert 20 Lbs of personal effort to keep it suspended.
But when Mr. Toga uses more bicep power with that same compound pulley, he’s able to dynamically raise its position in space until it eventually meets with the beam that supports it. All the while he’ll be exerting a force greater than W ÷ 2. That relationship is represented by,
F > W ÷ 2
In the case of a 40 Lb urn, the lifting force Mr. Toga must exert to dynamically lift the urn is represented by,
F > 40 Lbs ÷ 2
F > 20 Lbs
where F represents a bicep force of at least 20 pounds. Fortunately for him, his efforts will never have to extend much beyond 20 Lbs of effort to lift the urn to the beam. That’s because gravity’s effect will remain nearly constant as the urn climbs, this being due to gravity’s influence upon objects decreasing by an insignificant amount over short distances above the Earth’s surface. As a matter of fact, at an altitude of 3,280 feet, gravity’s pull decreases by a mere 0.2 %.
The net result is that the compound pulley enables the same mechanical advantage whether a static or dynamic scenario exists, that is, regardless of whether Mr. Toga is simply holding the urn stationary in space or he’s actively tugging on his end of the rope to lift it higher.
Next time we’ll see how mechanical advantage increases when we add more fixed and moveable pulleys to our compound pulley arrangement.
Copyright 2016 – Philip J. O’Keefe, PE
Engineering Expert Witness Blog
____________________________________ |
Tags: compound pulley, dynamic lifting, engineering expert, force, gravity, gravity's pull, mechanical advantage, simple pulley, static, weight
Posted in Engineering and Science, Expert Witness, Forensic Engineering, Innovation and Intellectual Property, Personal Injury, Product Liability | Comments Off on Dynamic Lifting is Easier With a Compound Pulley
Thursday, September 29th, 2016
|
In this blog series on pulleys we’ve gone from discussing the simple pulley to the improved simple pulley to an introduction to the complex world of compound pulleys, where we began with a static representation. We’ve used the engineering tool of a free body diagram to help us understand things along the way, and today we’ll introduce another tool to prepare us for our later analysis of dynamic compound pulleys. The tool we’re introducing today is the engineering concept of mechanical advantage, MA, as it applies to a compound pulley scenario.
The term mechanical advantage is used to describe the measure of force amplification achieved when humans use tools such as crowbars, pliers and the like to make the work of prying, lifting, pulling, bending, and cutting things easier. Let’s see how it comes into play in our lifting scenario.
During our previous analysis of the simple pulley, we discovered that in order to keep the urn suspended, Mr. Toga had to employ personal effort, or force, equal to the entire weight of the urn.
F = W (1)
By comparison, our earlier discussion on the static compound pulley revealed that our Grecian friend need only exert an amount of personal force equal to 1/2 the suspended urn’s weight to keep it in its mid-air position. The use of a compound pulley had effectively improved his ability to suspend the urn by a factor of 2. Mathematically, this relationship is demonstrated by,
F = W ÷ 2 (2)
The factor of 2 in equation (2) represents the mechanical advantage Mr. Toga realizes by making use of a compound pulley. It’s the ratio of the urn’s weight force, W, to the employed force, F. This is represented mathematically as,
MA = W ÷ F (3)
Substituting equation (2) into equation (3) we arrive at the mechanical advantage he enjoys by making use of a compound pulley,
MA = W ÷ (W ÷ 2) = 2 (4)
Mechanical Advantage of a Compound Pulley
Next time we’ll apply what we’ve learned about mechanical advantage to a compound pulley used in a dynamic lifting scenario.
Copyright 2016 – Philip J. O’Keefe, PE
Engineering Expert Witness Blog
____________________________________ |
Tags: compound pulley, engineering, force, lifting, mechanical advantage, pulley, simple pulley, static analysis, tools, weight
Posted in Engineering and Science, Expert Witness, Forensic Engineering, Innovation and Intellectual Property, Personal Injury, Product Liability | Comments Off on Mechanical Advantage of a Compound Pulley
Saturday, August 13th, 2016
|
Sometimes one of something just isn’t enough, like one potato chip, one glass of wine… And when it comes to lifting massive objects one simple pulley isn’t going to be enough to get the job done. Even the improved simple pulley, which we introduced last week, is often not enough, a situation which I’ve run across in my career as an engineering expert. To get past the limitations of the simple pulley and improved simple pulley, ancient Greeks went on to devise the compound pulley, which we’ll introduce today.
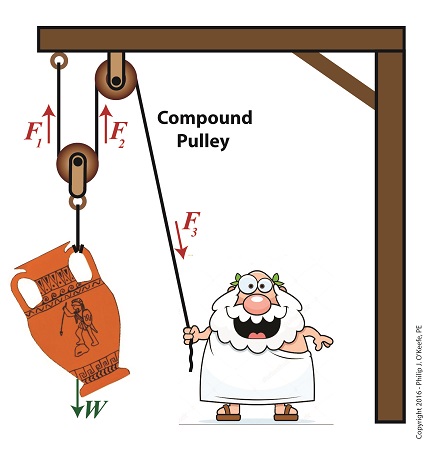
The Compound Pulley
A compound pulley, such as the one shown here, consists of two or more simple pulleys. In the compound pulley system, a combination of fixed and moveable simple pulleys are used to lift objects. The scenario shown in our illustration features a compound pulley consisting of two simple pulleys, one is stationary and affixed to a beam, the other hangs freely in space, riding on the rope connecting them. One end of the rope is held by Mr. Toga, the other end is affixed to the beam. In fact, all compound pulleys require that at least one simple pulley be affixed to a stationary structure, and at least one other simple pulley must be free to move in space.
When our toga clad friend pulls his end of the rope he exerts a force, F3, via the pulley affixed to the beam. This force transmits on to the pulley attached to the urn, which results in lifting the urn off the ground.
Next week we’ll calculate the force on Mr. Toga’s end, F3, as well as the other forces at play, F1 and F2.
Copyright 2016 – Philip J. O’Keefe, PE
Engineering Expert Witness Blog
____________________________________ |
Tags: beam, compound pulley, engineering expert, fixed simple pulley, force, moveable simple pulley, simple pulley
Posted in Engineering and Science, Expert Witness, Forensic Engineering, Innovation and Intellectual Property, Personal Injury, Product Liability | Comments Off on The Compound Pulley
Thursday, July 21st, 2016
|
Sometimes the simplest alteration in design results in a huge improvement, a truth I’ve discovered more than a few times during my years as an engineering expert. Last time we introduced the simple pulley and revealed that its usefulness was limited to the strength of the pulling force behind it. Hundreds of years ago that force was most often supplied by a man and his biceps. But ancient Greeks found an ingenious and simple way around this limitation, which we’ll highlight today by way of a modern design engineer’s tool, the free body diagram.
Around 400 BC, the Greeks noticed that if they detached the simple pulley from the beam it was affixed to in our last blog and instead allowed it to be suspended in space with one of its rope ends fastened to a beam, the other rope end to a pulling force, something interesting happened.
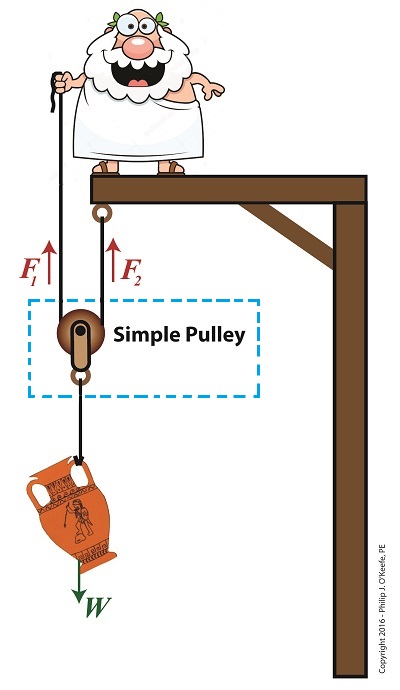
The Simple Pulley Improved
It was much easier to lift objects while suspended in air. As a matter of fact, it took 50% less effort. To understand why, let’s examine what engineers call a free body diagram of the pulley in our application, as shown in the blue inset box and in greater detail below.
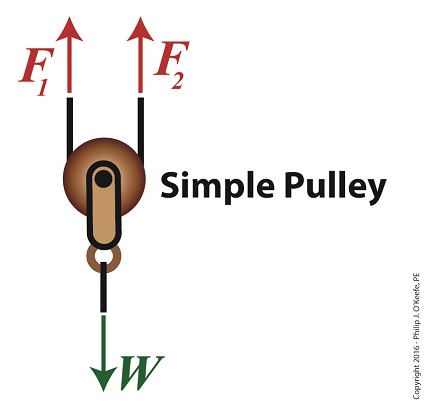
Using a Free Body Diagram to Understand Simple Pulleys
The blue insert box in the first illustration highlights the subject at hand. A free body diagram helps engineers analyze forces acting upon a stationary object suspended in space. The forces acting upon the object, in our case a simple pulley, represent both positive and negative values. The free body diagram above indicates that forces pointing up are, by engineering convention, considered to be positive, while downward forces are negative. The basic rule of all free body diagrams is that in order for an object to remain suspended in a fixed position in space, the sum of all forces acting upon it must equal zero.
We’ll see how the free body diagram concept is instrumental in understanding the improvement upon the action of a simple pulley next time, when we attack the math behind it.
Copyright 2016 – Philip J. O’Keefe, PE
Engineering Expert Witness Blog
____________________________________ |
Tags: beam, engineering expert, engineers, force, free body diagram, gravity, pulley, pulling force, rope, simple pulley, weight force
Posted in Engineering and Science, Expert Witness, Forensic Engineering, Innovation and Intellectual Property, Personal Injury, Product Liability | Comments Off on Using a Free Body Diagram to Understand Simple Pulleys
Friday, July 8th, 2016
|
Lifting heavy objects into position always presents a challenge, whether it’s a mom lifting a toddler to her hip or a construction worker lifting work materials to great heights. During my career as an engineering expert I’ve dealt with similar challenges, some of which were handled quite nicely by incorporating a simple pulley, which we introduced last time, into my design. But sometimes, due to certain restrictions, the addition of a simple pulley into the works isn’t enough to get the job done. We’ll take a look at one of the restrictions working against the use of a simple pulley today.
The simple pulley is believed to have first been used by the Greeks as far back as the 9th Century BC. Back then it would have come in handy to lift cargo aboard ships, hoist sails on masts, and lift building materials high off the ground to supply workmen during the construction of temples and other marvels of ancient architecture. In other words, pulleys literally saved ancient workers thousands of steps when it came to lifting things off the ground.
Let’s return to ancient times for a moment to get an understanding of the mechanics behind the workings of the simple pulley as put to use in a basic lifting application.
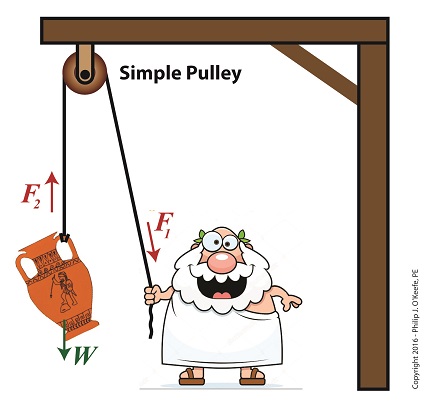
The Simple Pulley Gives Us a Lift
With a simple pulley, the tension force F1 applied to the rope by the pull-er is equal to the tension force F2 exerted upon the object, the pull-ee. Once lifted off the ground, these forces are also equal to the object’s weight, W, which gravity works upon to return the lifted object to its previous position on the ground. All these forces come to bear upon whatever’s doing the pulling. If this pull-er happens to be a human, then the simple pulley’s effectiveness to lift things is directly proportionate to that human’s strength. In the case of the toga’d figure above, that would be about 10 pounds. It’s this caveat that limits the usefulness of the simple pulley when relying on human power alone, particularly when it’s employed to lift extremely heavy objects like marble pillars. A single human isn’t up to the task.
Next time we’ll see how ancient Greeks overcame this limitation of the simple pulley by managing to cut in half the amount of brute force required to lift heavy objects.
Copyright 2016 – Philip J. O’Keefe, PE
Engineering Expert Witness Blog
____________________________________ |
Tags: cable, construction, engineering expert, force, hoist, lifting, pulleys, simple pulley, weight force
Posted in Engineering and Science, Expert Witness, Forensic Engineering, Innovation and Intellectual Property, Personal Injury, Product Liability | Comments Off on The Simple Pulley Gives Us a Lift
Thursday, March 24th, 2016
|
Last time we watched our example ceramic coffee mug crash to a concrete floor, where its freefall kinetic energy performed the work of shattering it upon impact. This is a scenario familiar to engineering experts like myself who are sometimes asked to reconstruct accidents and their aftermaths, otherwise known as forensic engineering. Today we’ll take a look at what happens when the shattered mug’s pieces are freed from their formerly cozy, cohesive bond, and we’ll watch their transmutation from kinetic energy to work, and back to kinetic energy.
As we watch our mug shatter on the floor, we notice that it breaks into different sized pieces that are broadcast in many directions around the point of impact. Each piece has its own unique mass, m, travels at its own unique velocity, v, and has a unique and individualized amount of kinetic energy. This is in accordance with the kinetic energy formula, shown here again:
KE = ½ × m × v2
So where did that energy come from?
The Scattering Pieces Have Kinetic Energy
According to the Work-Energy Theorem, the shattered mug’s freefalling kinetic energy is transformed into the work that shatters the mug. Once shattered, that work is transformed back into kinetic energy, the energy that fuels each piece as it skids across the floor.
The pieces spray out from the point of the mug’s impact until they eventually come to rest nearby. They succeed in traveling a fair distance, but eventually their kinetic energy is dissipated due to frictional force which slows and eventually stops them.
The frictional force acting in opposition to the ceramic pieces’ travel is created when the weight of each fragment makes contact with the concrete floor’s rough surface, which creates a bumpy ride. The larger the fragment, the more heavily it bears down on the concrete and the greater the frictional force working against it. With this dynamic at play we see smaller, lighter fragments of broken ceramic cover a greater distance than their heavier counterparts.
The Work-Energy Theorem holds that the kinetic energy of each piece equals the work of the frictional force acting against it to bring it to a stop. We’ll talk more about this frictional force and its impact on the broken pieces’ distance traveled next time.
Copyright 2016 – Philip J. O’Keefe, PE
Engineering Expert Witness Blog
____________________________________ |
Tags: engineering expert, force, forensic engineering, friction force, kinetic energy, kinetic energy formula, mass, velocity, work, work-energy theorem
Posted in Engineering and Science, Expert Witness, Forensic Engineering, Innovation and Intellectual Property, Personal Injury, Product Liability | Comments Off on Kinetic Energy to Work, Work to Kinetic Energy
Tuesday, March 15th, 2016
|
Last time we watched as the kinetic energy of our falling coffee mug was transformed into the work of creating a crater in a pan of soft kitty litter. Shock absorbing materials are often placed strategically to cushion valuable objects should they fall, and as an engineering expert I’ve sometimes had to implement break-its-fall solutions. Today we’ll place our mug into a less kind scenario, one in which it makes impact with the unforgiving hardness of a concrete floor. In so doing we’ll compare the mug’s ceramic to the floor’s concrete, and we’ll familiarize ourselves with the Mohs Scale of Hardness.
The Mohs Scale of Hardness, Ceramic vs. Concrete
Material hardness is commonly measured by the Mohs Scale of Hardness, which ranks the relative hardness of a material by observing how resistant it is to scratching by other materials harder than itself. This standard was developed by German mineralogist Friedrich Moh in 1812, and it rates objects’ hardness on a scale from 1.0, very soft, to 10.0, very hard. A fingernail, for example, ranks 2.5 on the scale, while a diamond ranks 10.0.
Now let’s take a look at the materials in our scenario, a ceramic mug and concrete floor, and see how they compare. The mug’s ceramic was created by mixing together clay, water, and other materials and then heating them in a kiln, a process known as firing. This firing causes a chemical reaction that bonds the individual materials tightly together, and when it cools it becomes the product we know as ceramic, a hard, brittle solid which registers at about 7.5 on the Mohs Scale.
The floor the mug falls to is poured-in-place cement, a compound consisting of primarily limestone, clay, pebbles and sand. When these materials are combined with water a chemical bonding takes place and forms the hard, stone-like matter we know as concrete, which comes in at about 8.0 on the Mohs Scale.
Although the mug’s ceramic is comparably hard to the floor’s concrete, its inherent brittleness, along with certain design features, most notably its handle, causes it to be fragile. Anyone broken a coffee mug lately?
As for the concrete floor the mug falls onto, it won’t yield to the mug’s freefall kinetic energy and form a crater like the litter did. So where does the mug’s energy go?
According to the Work-Energy Theorem, most of the mug’s kinetic energy is still converted into work, just as it was when it met up with the litter, but because the concrete floor is harder and thicker than the mug’s thin ceramic, the mug’s kinetic energy at impact falls back on itself rather than transferring externally into the concrete. The result is a shattered mug and a mess to clean up.
But we haven’t yet accounted for all the mug’s energy. We’ll find out what happens to the rest of it next time.
Copyright 2016 – Philip J. O’Keefe, PE
Engineering Expert Witness Blog
____________________________________ |
Tags: brittleness, cement, ceramic, concrete, energy, engineering expert, force, freefall kinetic energy, hardness, Mohs Scale of Hardness, shatters, work, work-energy theorem
Posted in Engineering and Science, Expert Witness, Forensic Engineering, Innovation and Intellectual Property, Personal Injury, Product Liability | Comments Off on Mohs Scale of Hardness, Ceramic vs. Concrete



